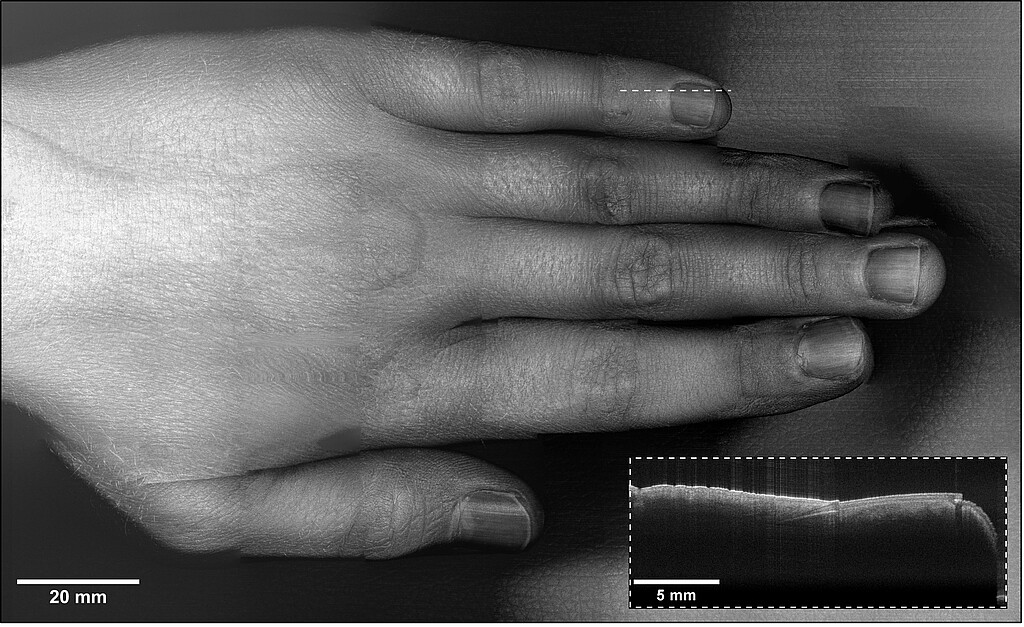
Optical Coherence Tomography (OCT) is a powerful imaging technique to visualize and localize depth-dependent tissue structures to differentiate between healthy skin and pathological conditions, such as inflammatory skin diseases. Here, it is particularly valuable because, in contrast to skin biopsy, it is non-invasive and can provide instant diagnostic results. A major problem is that commercial, clinically approved OCT-systems are typically slow and not capable of scanning large areas at reasonable speed. Since skin lesions may extend over several square centimeters, imaging of larger skin lesions in their full extend would take several hours, leading to unacceptable discomfort of the patient. However, when imaging only a few representative regions of interest, potential inflammatory infiltrates remain undetected.
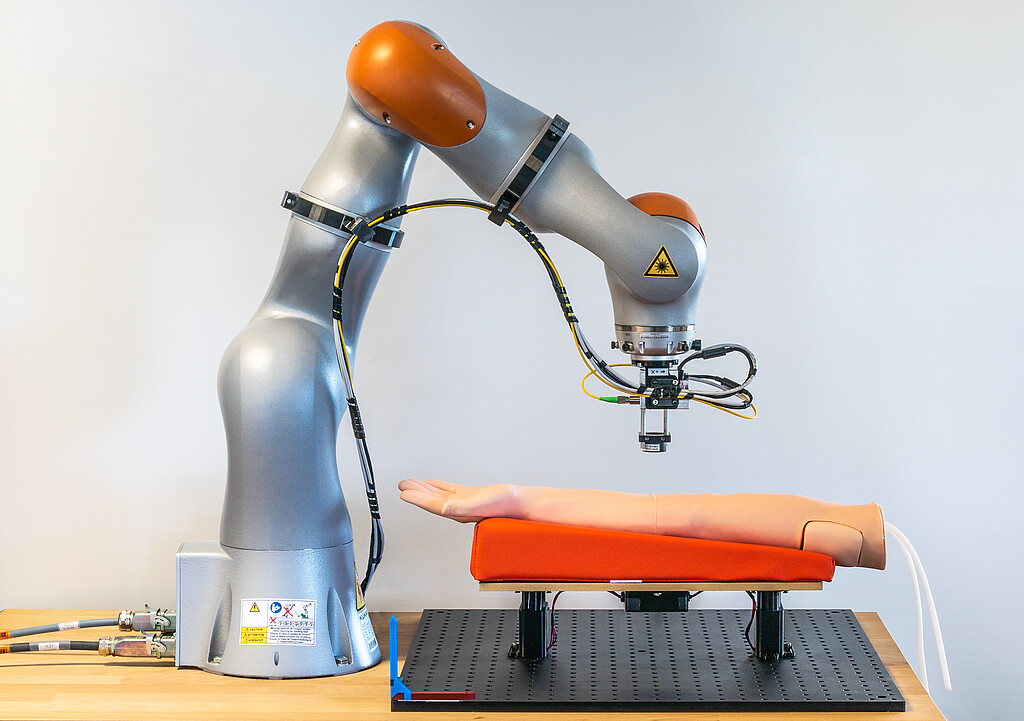
Therefore, a collaborative robot system is combined with an existing, home-built 3.3 MHz-OCT-system to allow automatic positioning of the OCT probe across the target. Skin imaging is especially challenging, because large 3D datasets with file sizes beyond 1 TB and various shapes need to be acquired. In contrast to previous approaches for automatic large area scanning, we developed an intrinsic, online probe-to-surface control for probe positioning and orientation while OCT imaging at real-time update rates. It features a combined surface-distance and surface-orientation closed-loop control algorithm, which enables automatic positioning of the probe solely based on the spatial surface information extracted from the acquired OCT image. Further, the 3.3 MHz A-scan rate of the proposed OCT-system, which is 10-100x faster than comparable OCT-systems, allows for image acquisition rates of up to 1 cm² per second.